

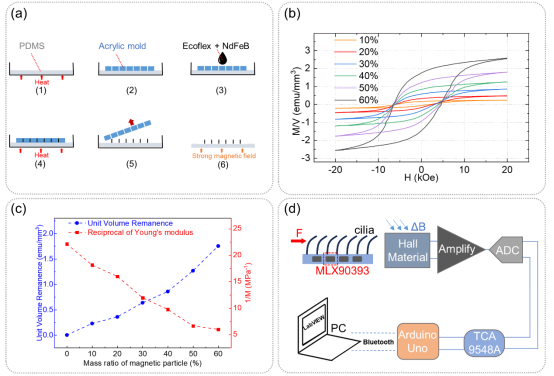
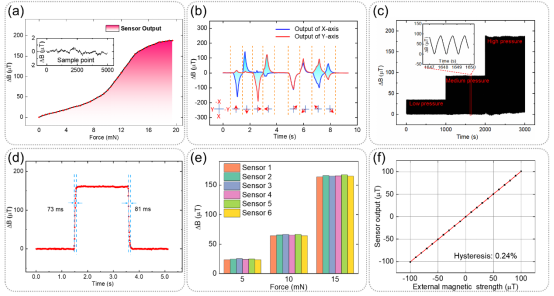
手上的使用 这款传感器的规划共同,由上至下分别是仿生磁性纤毛阵列、柔性聚二甲基硅氧烷(PDMS)薄膜,以及底层集成磁传感器阵列的)。当有外力触碰磁性纤毛,纤毛周围的磁场会产生显着的改变,经过高活络的磁传感器,就能核算出力的巨细和方向。其超高的0.2 mN分辨率,安稳的0至19.5 mN作业范围以及毫秒级的呼应时刻,让这款传感器不仅能丈量静态力,还能精准捕捉动态改变。
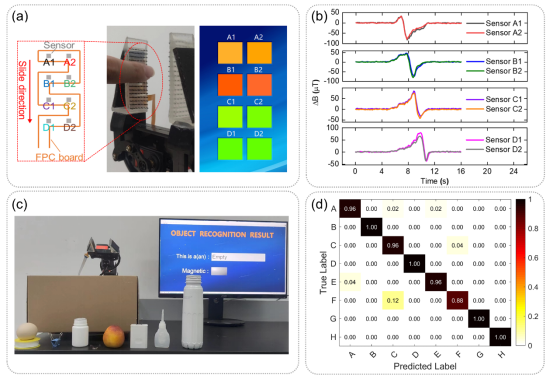
当这种传感器被集成到机器人的机械手中,就像给机器人增加了“触觉”。它们能经过辨认抓取的物体类型,试验效果为,其在物体辨认方面的准确率高达97%,可以区别物体的形状和内部结构,乃至有没有磁性。这使得机器人在履行更杂乱的使命时,能具有愈加细腻和全面的触感反应。
这项效果不仅是仿生学与磁传感技能的奇妙结合,更是智能机器人范畴的新探究。它将极大地提升机器人在医疗帮助、工业生产、家庭服务等多个场景中的适应性和智能化水平。 相关效果以“Magnetic Tactile Sensorwith BionicHair Array for Sliding Sensing and Object Recognition”为题宣布在世界闻名期刊《Advanced Science》上,中国科学院空天信息立异研究院博士研究生满建东为论文榜首作者,中国科学院空天信息立异研究院研究员陈嘉民为论文通讯作者。该项作业得到了国家重点研制方案、国家天然基金、北京市天然科学基金会等项目的大力支持。
原文标题:根据仿生毛发阵列的磁敏触觉传感器,用于机器人物体辨认和滑动检测


